Description
The use of modern high performance rehabilitation technologies allows to return motor activity to patients with neurological pathologies, in particular those for whom traditional methods of rehabilitation are ineffective.
A consortium consisting of: Scientific production association “Android technics”, Pirogov Russian National Research Medical University and Institute of Higher Nervous Activity and Neurophysiology of RAS has developed adaptive robotic rehabilitation systems taking into account the individual characteristics of a patient and the degree of his motor activity disorder.
Features of the robotic hand complex:
provides grasping and disclosure of the human relaxed hand due to the commands sent by an operator through the interface of a specialized software;
rehabilitation procedure involves stimulation of brain neuroplasticity mechanisms, activated by the imagination of movements;
the technology is based on fundamental research of brain neuroplasticity and tested in multicenter blind randomized clinical research on more than 100 patients.
The robotic hand exoskeleton complex also includes:
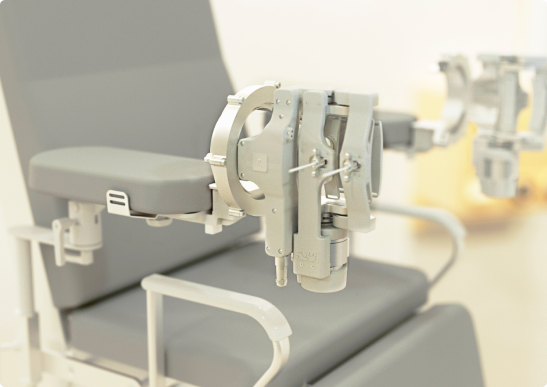
robotic hand exoskeleton with two degrees of freedom (right and left hands);
software with brain-machine interaction technique of imaginary motion with the control of the degree of this activation by biofeedback;
a software controller that provides control of the robotic hand exoskeleton;
personal computer;
operator workplace;
multifunctional medical chair, adjustable in height and backrest inclination (from 90 to 180 degrees)
electroencephalograph with active electrode system for taking brain impulses;
user manual
The medical staff highly appreciates the effect of the implemented technology of the motor functions recovery.
According to the experience in the implementation and use in routine clinical practice of several scientific and clinical institutions undoubted advantages of the complex “Exohand-2” can be identified:
active participation of the patient in the rehabilitation procedure (cognitive paradigm – imaging a movement “motor imagery”) regardless of the severity of motor deficit and recovery period;
multi-modal user interface;
approximation of the rehabilitation environment to the real one (imagination of applied, functionally significant movements);
ability to adequately control the intensity and regularity of trainings;
the use of different types of biofeedback (visual and kinesthetic).
Number of robotic hand exoskeletons (left and right) 2
Number of degrees of freedom of the robotic hand exoskeleton 2
Number of independent degrees of freedom of robotic exoskeleton 1
Rotation angle (hand gripper) 0...15 deg.
Rotation angle (finger gripper) 0...75 deg.
Equivalent stiffness angles in the joints of the robotic hand exoskeleton (hand gripper, finger gripper) 4 ≤ kк.≤ 8 N•m/rad.
The maximum torques in the joints of the robotic hand exoskeleton (hand gripper, finger gripper) ≤ 0.25 N•m.
The maximum value of the force tangential to the trajectory of the end effector of the finger gripper 20 min.
Torque control of electric motors with time delay <50 msec.
Supply voltage 24 V
A consortium consisting of: Scientific production association “Android technics”, Pirogov Russian National Research Medical University and Institute of Higher Nervous Activity and Neurophysiology of RAS has developed adaptive robotic rehabilitation systems taking into account the individual characteristics of a patient and the degree of his motor activity disorder.
Features of the robotic hand complex:
provides grasping and disclosure of the human relaxed hand due to the commands sent by an operator through the interface of a specialized software;
rehabilitation procedure involves stimulation of brain neuroplasticity mechanisms, activated by the imagination of movements;
the technology is based on fundamental research of brain neuroplasticity and tested in multicenter blind randomized clinical research on more than 100 patients.
The robotic hand exoskeleton complex also includes:
robotic hand exoskeleton with two degrees of freedom (right and left hands);
software with brain-machine interaction technique of imaginary motion with the control of the degree of this activation by biofeedback;
a software controller that provides control of the robotic hand exoskeleton;
personal computer;
operator workplace;
multifunctional medical chair, adjustable in height and backrest inclination (from 90 to 180 degrees)
electroencephalograph with active electrode system for taking brain impulses;
user manual
The medical staff highly appreciates the effect of the implemented technology of the motor functions recovery.
According to the experience in the implementation and use in routine clinical practice of several scientific and clinical institutions undoubted advantages of the complex “Exohand-2” can be identified:
active participation of the patient in the rehabilitation procedure (cognitive paradigm – imaging a movement “motor imagery”) regardless of the severity of motor deficit and recovery period;
multi-modal user interface;
approximation of the rehabilitation environment to the real one (imagination of applied, functionally significant movements);
ability to adequately control the intensity and regularity of trainings;
the use of different types of biofeedback (visual and kinesthetic).
Number of robotic hand exoskeletons (left and right) 2
Number of degrees of freedom of the robotic hand exoskeleton 2
Number of independent degrees of freedom of robotic exoskeleton 1
Rotation angle (hand gripper) 0...15 deg.
Rotation angle (finger gripper) 0...75 deg.
Equivalent stiffness angles in the joints of the robotic hand exoskeleton (hand gripper, finger gripper) 4 ≤ kк.≤ 8 N•m/rad.
The maximum torques in the joints of the robotic hand exoskeleton (hand gripper, finger gripper) ≤ 0.25 N•m.
The maximum value of the force tangential to the trajectory of the end effector of the finger gripper 20 min.
Torque control of electric motors with time delay <50 msec.
Supply voltage 24 V