 |
RL “Mechatronics of anthropomorphic robotic systems”
We have developed a research laboratory (RL) “Mechatronics of anthropomorphic robotic systems (ARTS)”, designed for research activities and providing the educational process.
Part number:
Supplier:
SPA “Android Technics”Description
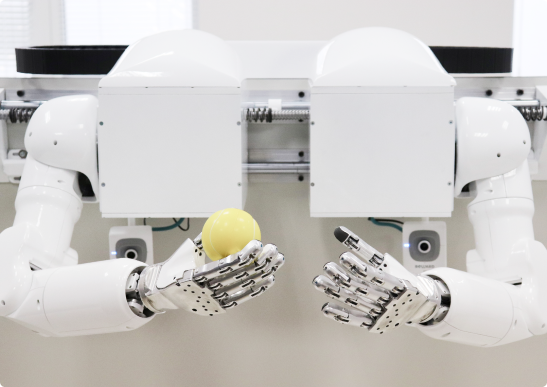
The basic unit of the laboratory is the module “Mechatronics” with a manipulator movement system equipped with a metal anthropomorphic gripper with five structural links, a technical vision system and specialized software. The module is designed to practice manipulative actions with various objects.
When working with RL, researchers have the opportunity to make changes to existing software or create new ones for specific tasks, testing their own developments on the robotic system.
The laboratory is easily integrated into existing educational programs. You get completely ready devices, which do not require assembly and complex configuration.
Open source code allows you to use already created code to independently create new versions of educational tasks, modify them.
Degrees of freedom 12
Rotational speed in the power joints up to 160 deg / sec
Accuracy of position fixing 2 deg.
Maximum load on power joints 1.5 kg
Module weight 10 kg
Advanced options:
ability to control with software created by using ready-made libraries;
position sensors: magnetic encoders, resistive encoders.
When working with RL, researchers have the opportunity to make changes to existing software or create new ones for specific tasks, testing their own developments on the robotic system.
The laboratory is easily integrated into existing educational programs. You get completely ready devices, which do not require assembly and complex configuration.
Open source code allows you to use already created code to independently create new versions of educational tasks, modify them.
Degrees of freedom 12
Rotational speed in the power joints up to 160 deg / sec
Accuracy of position fixing 2 deg.
Maximum load on power joints 1.5 kg
Module weight 10 kg
Advanced options:
ability to control with software created by using ready-made libraries;
position sensors: magnetic encoders, resistive encoders.