 |
RL “3D Laboratory complex”
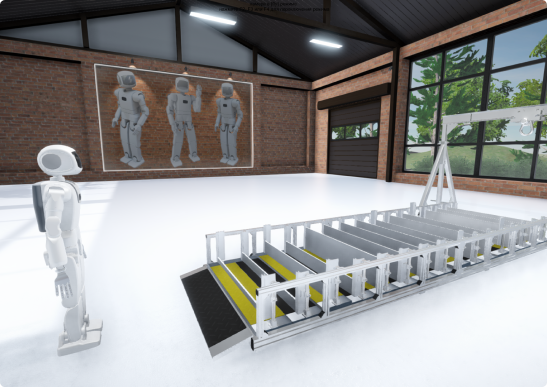
Research laboratory “3D Laboratory complex “(“3D LC”) is a software environment for 3D modeling based on the emulator model of the robotic complex (RTC) and the model of the environment in different versions. 3D Laboratory complex is designed for educational activities at all levels of training, formation and development of practical skills of creation of algorithms and software products for robotic systems for educational and research purposes. The laboratory complex can be used for education in the areas (specialties) of higher professional education, included in 7 of 29 enlarged groups of specialties.
Part number:
Supplier:
SPA “Android Technics”Description
Research laboratory “3D LC” includes:
3D model of a robotic system;
3D model of the environment;
3D model of experimental stand / polygon;
3D models of manipulation objects;
specialized software (installed on 15 personal computers of users and protected by an electronic key; possible increase in the number of users);
user manual.
The laboratory complex allows:
to simulate the robotic system kinematics;
to simulate the movement of the constituent parts (modules) of the robotic system;
to emulate the operation of the sensors;
to test the motion control algorithms of the robotic system.
Manipulator modules of the anthropomorphic robotic system provide:
motor skills close to human hands;
performance of additional support function at movement on ladders and on slopes when overcoming obstacles and changing the spatial position of the robotic system.
Modules of gripping devices allow to carry out:
force-controlled grasp and holding objects;
fixation and movement of objects weighing up to 3 kg (by each module of the manipulator gripper);
performing manipulations with “fine motor skills”, ensuring the implementation of technological operations and use of manual (special) tools.
Support modules of the anthropomorphic robotic system allow:
to develop software for dynamic upright and dynamic equilibrium of the platform;
to simulate stepper two-support dynamic movement of the platform with the total weight up to 60 kg at the speed up to 6 km / h;
to carry out transfer of reference reactions at interaction of the robotic system with external objects.
The developed software “3D LC” can be loaded into the real robotic system control system.
3D model of a robotic system;
3D model of the environment;
3D model of experimental stand / polygon;
3D models of manipulation objects;
specialized software (installed on 15 personal computers of users and protected by an electronic key; possible increase in the number of users);
user manual.
The laboratory complex allows:
to simulate the robotic system kinematics;
to simulate the movement of the constituent parts (modules) of the robotic system;
to emulate the operation of the sensors;
to test the motion control algorithms of the robotic system.
Manipulator modules of the anthropomorphic robotic system provide:
motor skills close to human hands;
performance of additional support function at movement on ladders and on slopes when overcoming obstacles and changing the spatial position of the robotic system.
Modules of gripping devices allow to carry out:
force-controlled grasp and holding objects;
fixation and movement of objects weighing up to 3 kg (by each module of the manipulator gripper);
performing manipulations with “fine motor skills”, ensuring the implementation of technological operations and use of manual (special) tools.
Support modules of the anthropomorphic robotic system allow:
to develop software for dynamic upright and dynamic equilibrium of the platform;
to simulate stepper two-support dynamic movement of the platform with the total weight up to 60 kg at the speed up to 6 km / h;
to carry out transfer of reference reactions at interaction of the robotic system with external objects.
The developed software “3D LC” can be loaded into the real robotic system control system.